Roadshow Cobot - collaborative robots in practice
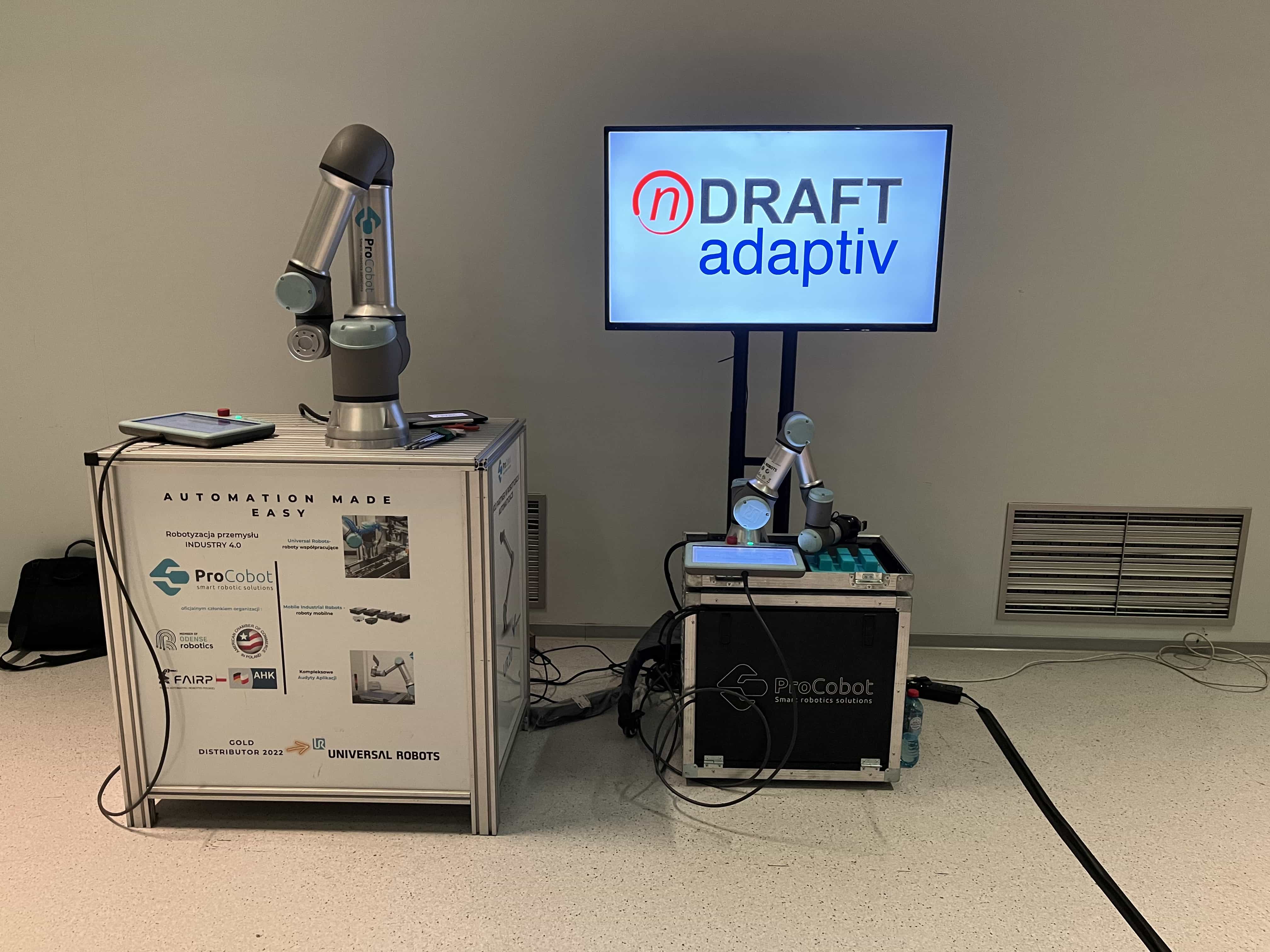
Historic - the first public appearance at which we had the opportunity to present our projects with collaborative robots. Events of this type are an attraction for interested and future users due to the opportunity to learn about collaborative robots in practice. Mirek, an autonomous mobile robot from MiR, was constantly driving around the room; a new model from Universal Robots - UR20 - towering against the wall, and on his right side was our station - UR3e and UR16e robots, and behind them was a TV showing recordings of our projects.

From the right: UR20, UR3e, UR16e
The event began with coffee and a lecture by Procobot, presenting the offer of MiR and Universal Robots robots, which, interestingly, come from one Danish town and are often implemented together, when an autonomous robot carries an arm of a collaborative robot. After another coffee break, it was time for our performance, where we presented all our previous projects with collaborative robots. The arm itself is a component of the station, to use it in practice it must be equipped with a tool and ensure the flow of materials. Our role is to develop, from scratch, a workstation ready to replace the operator - relieving people from tedious, repetitive work.
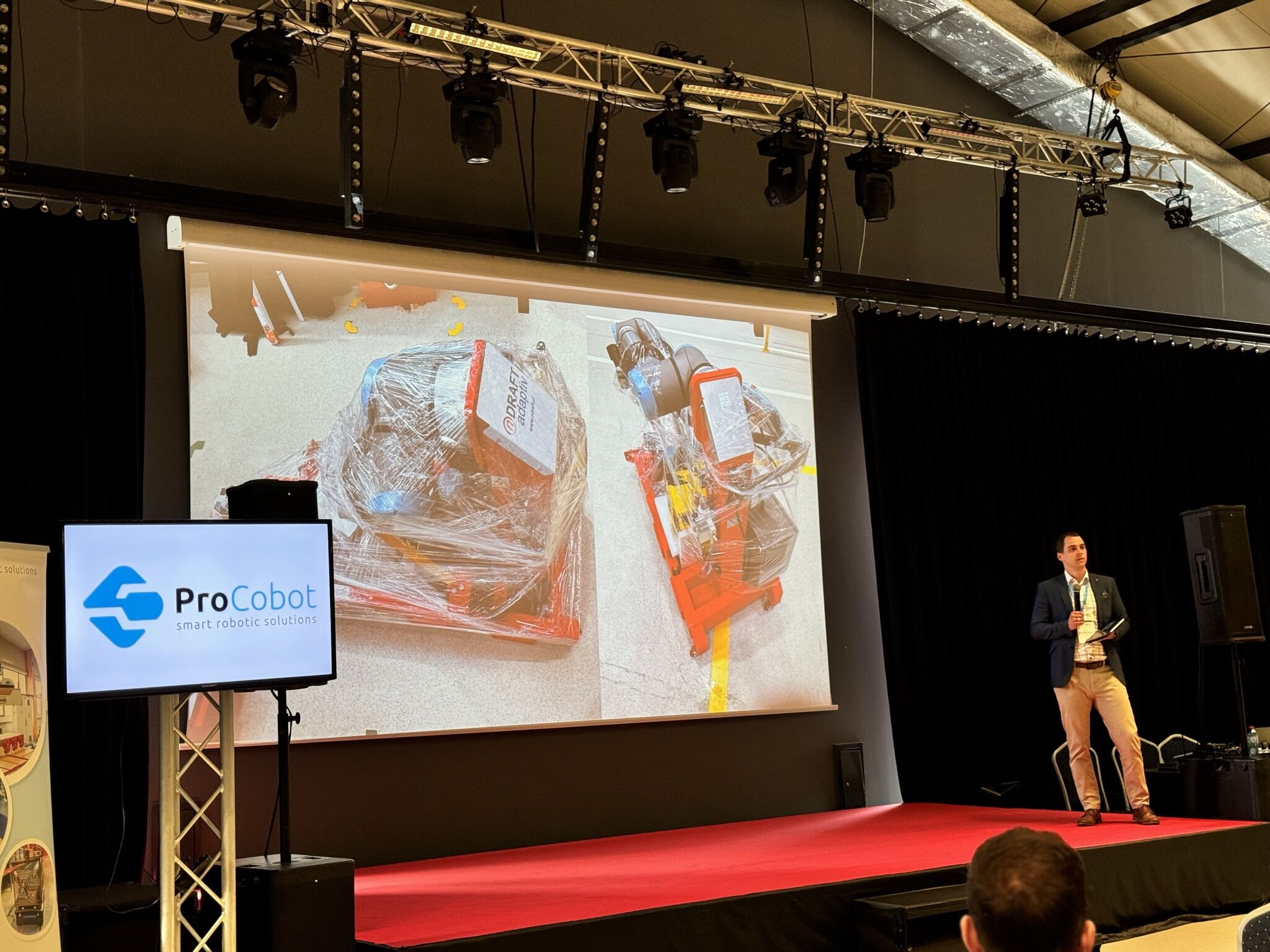
The slide shows packed UR10e cobots, named Kajko and Kokosz,
working tirelessly without a fence in one of the factories in Opole.
Palletizing, assembly, packaging - this is the scope of work of robots in our projects, in each project we have developed our own gripper, a full station concept, we have often worked together with the client on arranging the flow of materials to improve the production process. In addition to the arm, the stations often required an automation system using: vision systems, pneumatics, servo drives, belt or gravity feeders. The stand with the least amount of additional components is the solution seen above, produced in two copies - Kajko and Kokosz. This station uses only a collaborative robot, whose functionality has been extended to include PLC and HMI. Finally, apart from the robot controller, there are only sensors, a signaling column and electro-pneumatic valves.

The slide shows the learning panel and the URCaps toolbar, developed by us.
It allows you to edit the shelf load, open and close the gripper, as well as display OEE and the number of pieces produced in the current and previous shift.
The biggest advantage of collaborative robots is the ability to detect contact with the environment. This functionality has two applications - firstly, protecting people against health damage, and secondly, adaptation to the environment. This adaptation may consist in: changing the position of picking up/putting down the component on the base, adjusting the angle/tilting of the component to reality, as well as working with the appropriate force during grinding or deburring.
The UR3e cobot with a finger gripper moved blocks from a flat position to a vertical tower and back throughout the entire event. It took us only 30 minutes to develop the program from scratch.
There was great interest in the stand after the lectures, at the last stage of the event, when, next to the robot arms, participants could ask both us and experts from Procobot about technical details and possibilities. The presence of technical staff meant that, in addition to the answers, the participants could also gain practice in the form of live testing of how to use these devices, how to implement a given functionality and what it looks like on the learning panel interface.

For us, the whole event started the day before, when the Wrocławski Hotel Terminal allowed us to settle down in the evening. While setting up the equipment, we used the projector to take part in the football emotions during the Scotland - Switzerland match...

...and the strength gave us gargantuan-sized pieces of pizza, which for some reason we were not able to consume at once 🙂

Many thanks to Procobot for organizing the event as well as providing the TV and robot arms for demonstration purposes!
Below is a photo gallery - thank you for your attention 🥳